Ursprünglich für Indoormodelle geplant, entpuppte sich das
bisherige "Borgprojekt 1999" als absolut outdoorgeeignet. Es verging
fast kein Tag auf dem Flugplatz ohne mindestens einmal die kleine Videokamera
auf den Flieger zu schnallen. Das orientieren über den Suchermonitor
klappte schnell sehr gut und das "Blindfliegen" wurde als neue "Modellflugsparte"
geboren.
Es ist schon ein Superspaß einen Landeanflug nach Videobild einzuteilen
- Mit dem einen Auge sieht man wie sich das Landefeld dem Flieger nährt,
mit dem anderen Auge läßt sich die Einteilung vom Boden aus
überwachen. Schnell wurde uns bewußt, das hier noch Entwicklungspotential
steckt - Warum nicht nur nach Monitor fliegen, sondern auch LANDEN!?
Um dieses zu ermöglichen währe dann aber eine 3D-Sicht zwingend
erforderlich. Entfernungen (insbesondere im Landeanflug) einzuschätzen
ist ohne dreidimensionalem Sehen sehr schwierig.
Nach kurzem Überlegen waren folgende Möglichkeiten denkbar:
- Zwei Kameras mit einem Übertrager, welche mittels Elektronik
ihr Signal abwechselnd übermitteln. Der Schaltkanal des
Übertragers wird zu Synchronisation genutzt......
- Komplett getrenntes System mit zwei Übertragern, zwei Empfängern......
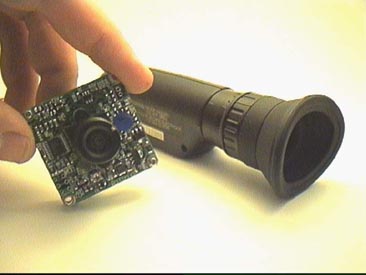
Als Visor kommen ohnehin nur die altbewährten Kamerasucher in Frage - auch hier dann zwei identische.
Wer sich schon mal mit der Videoübertragung
im Sinne des "Borg-Projekts 1999" befasst hat wird sicher wissen, daß
die gesamte Angelegenheit nicht ganz billig ist.
Im "Borg-Projekt 2000" wird das nun aber für die Hobbykasse wirklich
zu viel (zumal 25mW Übertrager zum Einsatz kommen). Ich möchte
daher erwähnen, daß die gesamte Finanzierung von "Timo Müller",
im Rahmen eines Experimentalprojektes, übernommen wurde. Aufgrund
meiner Erfahrungen mit der Videofunkübertragung aus Flugzeugen wurde
somit "mein Traum" in enger technischer Zusammenarbeit realisiert.
Um es vorweg zu nehmen - der technische Aufwand hat sich gelohnt -
das Projekt ist als "Oberknaller" und superspannend einzustufen......
Somit gibt es auch hierüber einen Exklusivbericht (mit reichlich bunten Bildern) für die Leser meiner Page:
 |
Da das "Problem" der Finanzierung als erledigt zu
betrachten ist, entschieden wir uns für die teure und wahrscheinlich
auch bessere Lösung. - Alle Komponenten wurden in doppelter Ausführung
angeschafft. Neben der 3D Übertragung sollte aber auch eine einfache
Videoaufzeichnung möglich sein - selbstverständlich in Farbe
- Somit mußte also eine Farb-CCD-Kamera her. Um ein absolut identisches
Bild für die 3D-Sicht zu bekommen, zwingt sich leider auch eine zweite
absolut identische Kamera auf - also die andere auch in Farbe....
|
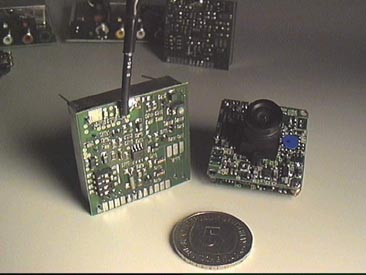
^ Bilder einfach mal zum anschauen ^
|
Hier muß ich einmal das Organisationstalent von
Timo loben! Es ist schon schwierig einen einzelnen Suchermonitor zu bekommen,
ohne einen Stapel Geld auf den Tisch zu legen - aber zwei absolut identische
zu organisieren ist fast unmöglich. Ich weiß nicht wie er das
geschafft hat, aber nach wenigen Tagen (!) lagen zwei neue (!), identische
Exemplare inklusive Schaltplan vor! Hinzu kommt, daß er hierfür
nichts bezahlt hat - Noch Fragen.......
|
 |

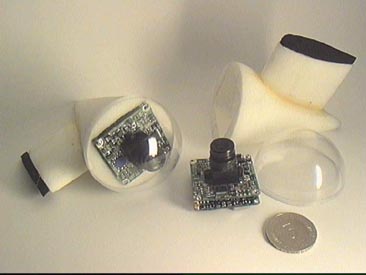
So soll dann die Montage am Flieger aussehen - Aerodynamisch und Optisch eine elegante
Lösung. Die Formteile sind aus Rohacell gedreht, die "Glaskuppel" stammt aus dem Bastelladen und ist wohl ursprünglich für Dekorationszwecke bestimmt gewesen.
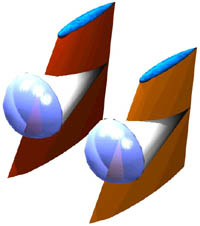
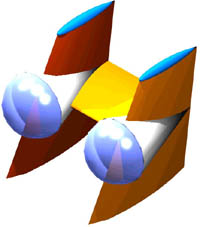
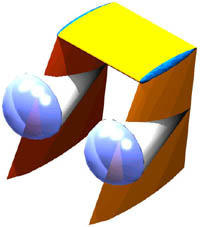
Hier einige Variationsmöglichkeiten der Kameramontage in den Leitwerken.....
und die vorerst Finale Lösung..
 |
Die gesamte Technik war also vorhanden - jetzt muß sie "nur" noch zusammengebaut werden. Dieses Foto ist in meiner Werkstatt entstanden, in der es einmal wieder wie im Handgranatenwurfstand nach einer Gasexplosion aussieht. Es ist wohl unschwer zu erkennen, daß wir absolut keinen Spaß gehabt haben und unter extremen Zeitdruck arbeiten mußten. (Ha Ha) < "Lötexperte" Timo bei der Problembewältigung... |
|
Die Visoren wurden mittels Schrumpfschlauch und Servotape
an einem kleinen Aluwinkel fixiert. Selbiger besitzt auf der Innenseite
gesenkte Bohrungen zur späteren Arretierung durch 4mm Senkschrauben.
Untereinander sorgt ein 2mm Alublechstreifen mit Langlöchern für
ausreichende Einstellungsmöglichkeiten.
Auffallend sind die rel. kompakten Abmessungen der Monitoren - Auch diese werden wieder über Spannungsregler (hier 8V) von den 12V der Empfangseinheit durch ein geschirmtes Kabel versorgt. |
 |
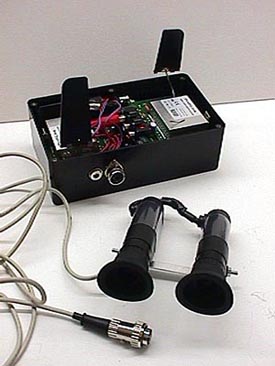 |
Die Beiden Empfänger finden in einer Eurobox Unterschlupf. Der Visor wird mittels DIN-Stecker angekuppelt und fertig. Entsprechende Spannungsregler sind selbstverständlich in der Empfangseinheit integriert, sodaß ein 10-Zellen Akku oder ein Stecker für den Zigarettenanzünder reicht. Diese Box soll nicht am Mann getragen werden, sonder soll z.B. auf dem Autodach liegen. Daher besitzt der Visor auch ein rel. langes Kabel. |
|
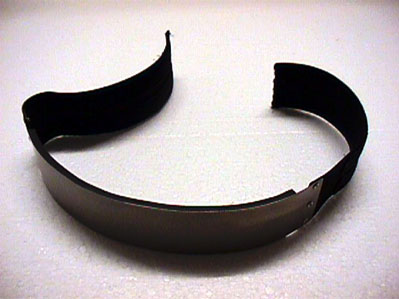
Selbstverständlich müssen die Visoren in Form
einer "Brille" getragen werden. Ein starrer Alubügel wie bei dem alten
Projekt sollte es diesmal nicht sein, da Vereinskollegen über mangelden
Tragekomfort klagten (komisch - bei mir passte der 100%). Folglich wurde
ein hochflexibles "Stirnbant" aus 0,4mm Titanblech gebastelt. Rückseitig
ist selbiges mit 4mm Neopren beklebt. Der erforderliche Anpressdruck wir
durch das 5cm hohe Bundband erzeugt - Verschlossen wird das Stirnband über
aufgenähtes Klettband.
Eine runde Sache, die sich sehr gut tragen lässt > |
 |
 |
Über kleine Bügel aus 2mm Alu wurden letztendlich die Monitore an dem "Stirnband" befestigt - man sollte meinen, daß diese Konstruktion schwer wie Blei ist und sich unbequem trägt - sie ist es aber absolut nicht! < Der komplette Visor wiegt tatsächlich nur 233g ! |


Okay - jetzt schmeißt euch erstmal weg .... Links Lötexperte
"Timo"; rechts meine Wenigkeit.
 |
Nachdem der Visor nun fertiggestellt
war, konnten wir erstmal ECHTE 3D BILDER sehen und kamen zu folgenden Erkenntnissen:
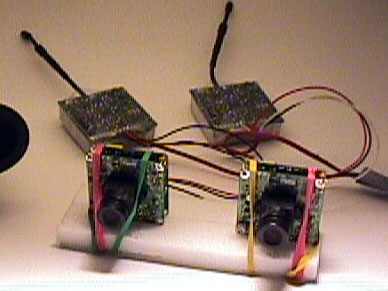
Um einen dreidimensionalen Effekt verwirklichen zu können, war es zwingend notwendig, den Abstand der Kameras dem Augenabstand des Menschen anzupassen. Da die CCD-Kameras einen weiten Sichtbereich aufweisen, ist die Ausrichtung in der Längsachse nicht allzu gravierend. Hier führen kleinere Abweichungen nicht zum Verlust der Tiefeninformation des Bildes. Werden die Kameras nicht dem Augenabstand angepasst, erscheint das Bild zwar noch dreidimensional, aber die Orientierung wird sehr schwer. Ich denke mal, daß das Gehirn mit den "aufgezwungenen", unterschiedlichen Blickwinkeln keine vernünftige Tiefeninformation "errechnen" kann. Die oben aufgezeigten Montagemöglichkeiten können somit nicht verwirklicht werden, da bei der Flügelmontage eine erhebliche Abweichung zum normalen Augenabstand entstehen würde....... < Experimentalaufbau zur Erforschung des 3D-Effekts.
|
| Letztendlich war die einfachste
Lösung mal wieder die Beste:
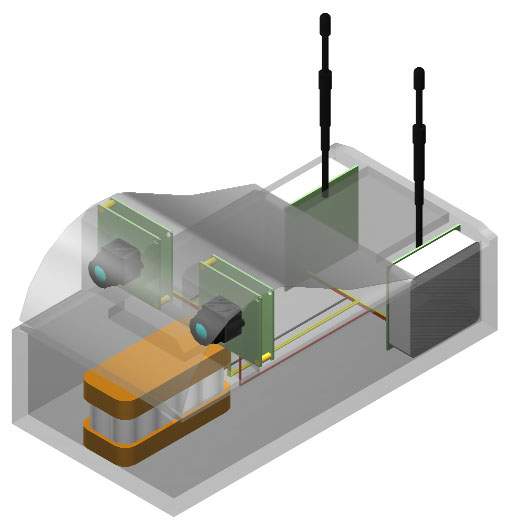
Zu Beginn des Projektes wurde ja eine Nutzlast definiert, die das Experimentalmodell tragen sollte. Folgende Vorgaben wurden von Seiten der Dozenten gemacht: a) Die quaderförmige Nutzlast sollte die Abmaße 50x100x200
mm haben.
Allso integrierten wir das ganze Gelumpe in die Box und fertig! Die
Breite von 100mm ließ die Einhaltung des Augenabstandes locker zu.
Lange Kabelwege, Stecker und ander Fehlerquellen treten so gar nicht erst
auf.
|
 |


So sieht dann das recht eigenwillige "Experimentalmodell" der FH-Bremen
aus.
Links der Kohlefaserrumpf unmittelbar nach Fertigstellung, rechts das
komplette Modell inklusive der Kameras.

Schau mir in die Kameras, kleines ......

Zum Glück erfolgte der Erstflug nur mit einer Ersatzlast - Unmittelbar
nach dem "Abheben" überschlug sich das
Modell und wurde leicht beschädigt. Die Flugeigenschaften des
Experimentalprojekts mußten noch verbessert werden -
Da das Projekt abgeschloßen ist, kann ich nun über
die Funkübertragung verfügen -
Ein eigenes, spezielles Modell für den absoluten Blindflug ist
schon in Arbeit.
Da wird es hier bestimmt noch einiges zu lesen geben.....